意のままの走りで、
どんな道も進んでいける。
SUPER ALL WHEEL CONTROL―車両運動統合制御システム―
-
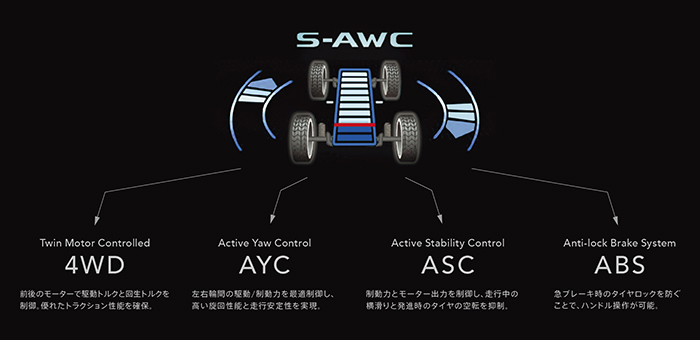
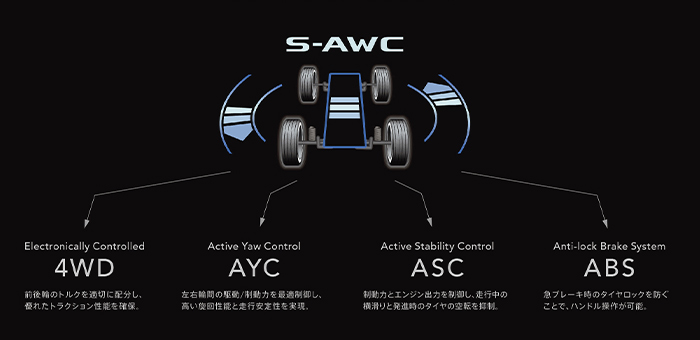
S-AWC(Super All Wheel Control)は、4輪の駆動力・制動力を最適に制御することで優れた操縦性と高い走行安定性を実現する三菱自動車独自の車両運動統合制御システムです。PHEVモデルでは緻密な制御が可能なツインモーター4WDと、ガソリンモデルでは電子制御4WDと組み合わせることで、ドライバーの意思と走行状況を読み取り、あらゆる状況で優れた走行性能をもたらします。
PHEV MODEL

GASOLINE MODEL

-
-
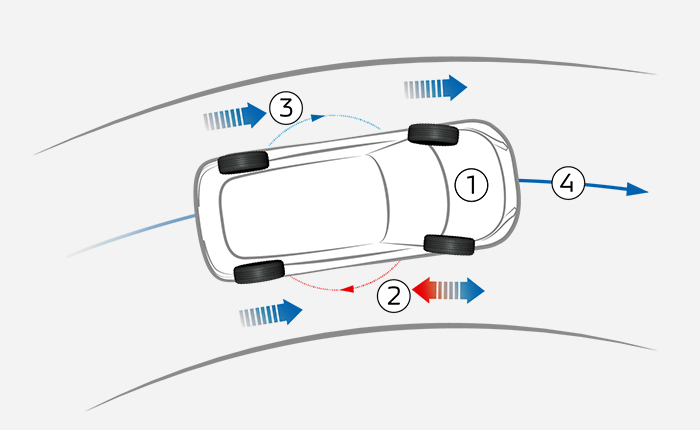
1ドライバーの操作と車両状態をセンサーで検知し、前後の駆動力配分とブレーキ制御量を決定。
2ブレーキを制御するAYC*1とASC*2、ABS*3を統合し、左右輪間の駆動/制動力を制御。
3[PHEVモデル]前後モーターを制御し、走行状況に応じて前後に駆動力を配分。
[ガソリンモデル]リヤデフに設けられた電子制御カップリングを制御し、走行状況に応じて後輪に駆動力を配分。4安定した走行性能と、リニアなハンドリングを実現。
- *1 AYC=Active Yaw Control ブレーキを制御することで、車両に働くヨーモーメントを最適に制御し、高い旋回性能と走行安定性を実現します。
- *2 ASC=Active Stability Control PHEVモデルではブレーキとモーター出力を、ガソリンモデルではブレーキとエンジン出力を制御することで、姿勢の乱れを抑制しクルマの安定性を確保します(スタビリティコントロール機能)。また、滑りやすい路面で発進する際、車輪のスリップを防ぎ、発進・加速をサポートします(トラクションコントロール機能)。
- *3 ABS=Anti-lock Brake System 滑りやすい路面や高速走行中の急ブレーキで、ブレーキを制御し、タイヤのロックによって起こりやすい横滑りを防ぎ、安定した車体姿勢の確保、ハンドル操作による障害物の回避を容易にするブレーキシステムです。
意のままの走りをどんな状況でも。
-
S-AWCは、ドライバーの操作と車両の挙動を車両各部のセンサーで検知し4輪を制御することで、意のままの走りをもたらします。
ガソリンモデルでは電子制御4WDを、PHEVモデルではより緻密な制御が可能なツインモーター4WDをベースに、「アクティブヨーコントロール[AYC]」さらに、ABSと「アクティブスタビリティコントロール[ASC]」を組み合わせて4輪の駆動力・制動力を制御します。
このシステムにより、さまざまな走行状態で4輪のタイヤ能力をバランスよく、最大限に発揮することが可能です。 -
旋回時のライントレース性
旋回時は走行ラインが外に膨らまず、イメージ通りのラインをトレース。
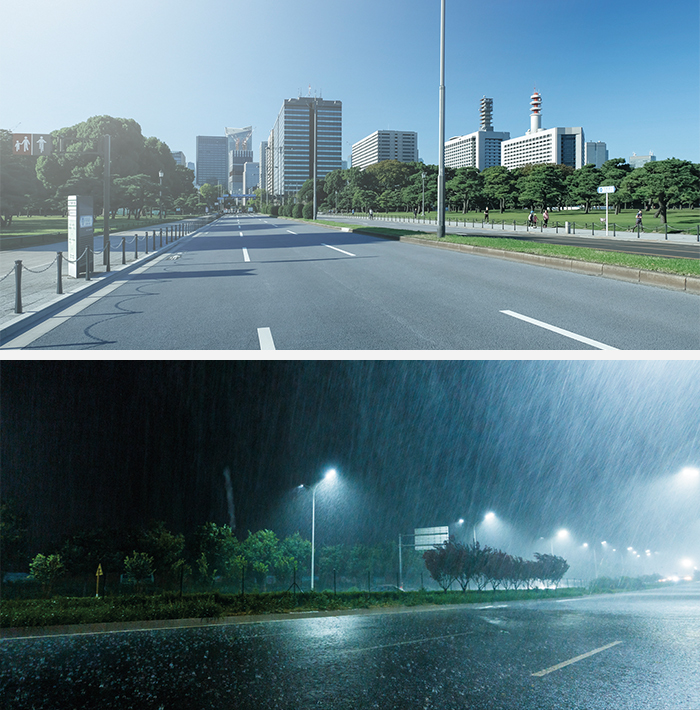
走行時の安定性
高速直進時やレーンチェンジでも、車体が振られることなく、安定した走行を実現。
滑りやすい路面の走破性
雪道の発進や悪路走行でも、スリップ量が小さく、安全で力強い走行を実現。
S-AWCで制御するドライブモード
路面状態や走行状況に合わせて最適に設定したモードを設定。走行状況に応じて選択することで、常に適切な制御効果を得ることができます。
S-AWCのシステム構成
ドライバーの操作と車両挙動を車両各部のセンサーで検知。電子制御4WDはエンジン、トランスミッション、ハンドル角などの情報を元に、リヤデフの電子制御カップリングを制御してAYC、ASC、ABSにより4輪のブレーキを制御。さらにASCではエンジン出力も制御。左右輪の駆動力・制動力をコントロールします。
また、PHEVモデルではツインモーターにより前後の駆動力の制御も行います。 -
[NORMAL]通常使用するモード。様々な状況で適切な4WD性能を実現。
[SNOW]雪道での走行に適したモード。滑りやすい路面で安定性を向上。
[GRAVEL]主にダートや起伏のある路面での走行に適したモード。4WDの高い走破性と安定した旋回性を実現。
[TARMAC]ドライ路面でのワインディングロードに特化したモード。乾燥舗装路でのスムーズで力強いコーナリングを実現。(PHEVモデルのみ)
● S-AWCは、4WD車に標準装備。
路面状態や走行状況に合わせて
最適なモードを選べるドライブモード。
[S-AWC標準装備]4WD全車
PHEV MODELGASOLINE MODEL
路面状態や走行状況に合わせて最適なモードを選べるドライブモード。 センターコンソールにあるドライブモードセレクターを操作することで直感的にモードの選択が可能。 各モードごとに前後駆動力配分や、AYCとASC、ABSの制御を専用にチューニングすることで、さまざまな走行シーンに最適化したドライブモードを設定。
常に適切な制御効果を発揮し、意のままで安定した走りをもたらします。
-
NORMALモード
さまざまな路面環境に幅広く対応する走行性能と燃費性能をバランス良く発揮。
-
SNOWモード
雪道などの滑りやすい路面でも安心感が高く、かつドライバーの意図通りの走りを実現。
-
GRAVELモード
砂利道や未舗装路の他、豪雨の際でもトラクション性能を高め、加速時やコーナリング時の高い安定性を実現。
-
TARMACモード
ワインディングなどでキビキビと走れる、高い旋回性を発揮。
TARMACモード(PHEVモデルのみ)
