走行支援機能
走行支援機能について
| 範囲 | 機能名 | 機能説明 | 支援内容 | 使用するセンサー※1 | ||||
|---|---|---|---|---|---|---|---|---|
| レーダー | カメラ (フロント) |
センサー | カメラ(3Dマルチアラウンドモニター/マルチアラウンドモニター)★ | |||||
| 前方側方 |  |
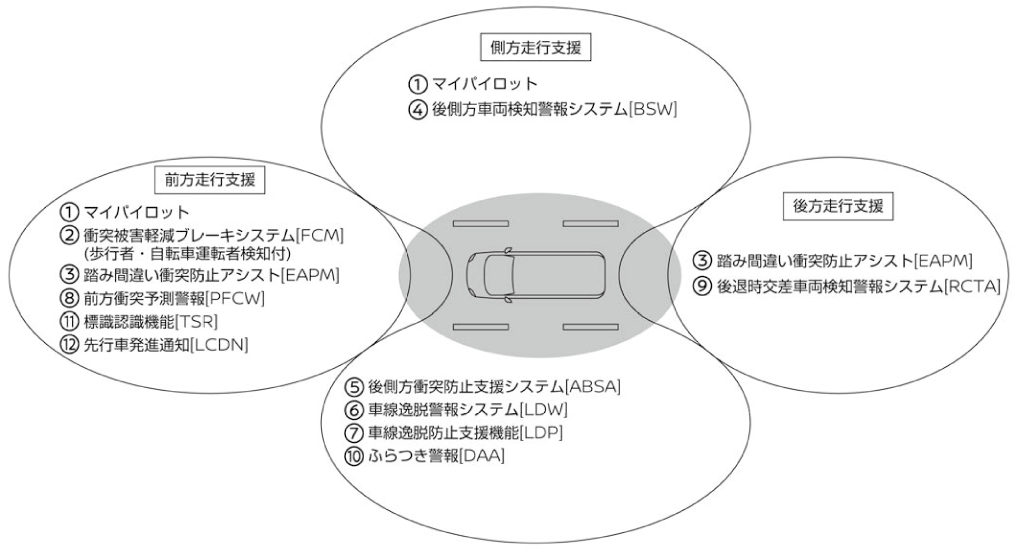
マイパイロット★ | 前方車両との車間距離を制御し、前方車両停車時は停車してその状態を保持します。また、走行車線内を走行するようにハンドルを自動制御することで運転操作の負担を減らします。(マイパイロット★) | 支援 | ○ | ○ | - | - |
| 前方 |  |
衝突被害軽減ブレーキシステム[FCM] | 前方の車両や歩行者、自転車と衝突のおそれがあるとき、警報とブレーキにより、運転者の衝突回避操作を支援します。(衝突被害軽減ブレーキシステム[FCM](歩行者・自転車運転者検知付・交差点アシスト★) | 支援 | ○ | ○ | - | - |
| 前方後方 |  |
踏み間違い衝突防止アシスト[EAPM] | ブレーキペダルとアクセルペダルの踏み間違えや、ブレーキ操作遅れが起きたときに警報音と表示で警告し、さらに過度な加速の防止や障害物への衝突防止を支援します。(踏み間違い衝突防止アシスト[EAPM]) | 支援 | - | ○※2 | ○ | ○※3 |
| 前方 |  |
前方衝突予測警報[PFCW] | 前方を走行する2台前の車両を検知し、急な減速などにより、自車の回避操作が必要と判断した場合に警報します。(前方衝突予測警報[PFCW]) | 情報提供警報 | ○ | - | - | - |
 |
標識認識機能[TSR] | 運転者に最高速度標識/車両進入禁止標識/一時停止標識があることを知らせます。(標識認識機能[TSR]) | - | ○ | - | - | ||
 |
先行車発進通知[LCDN] | 先行車が発進しても自車が停止し続けた場合に、音と表示でお知らせする機能です。(先行車発進通知[LCDN]) | ○ | ○ | - | - | ||
| 側方 |  |
後側方衝突防止支援システム[ABSA]★ | 隣車線に車両がいるときに車線変更を開始した場合、警報とともに車両を元の車線内に戻すよう支援します。(後側方車両検知警報システム(レーンチェンジアシスト機能付)[BSW/LCA]★/後側方衝突防止支援システム[ABSA]★) | 支援 | ○ | ○ | - | - |
 |
車線逸脱防止支援機能[LDP] | 運転者が意図せず走行車線から逸脱しそうなとき、車線内に戻す操作を支援します。(車線逸脱警報システム[LDW]/車線逸脱防止支援機能[LDP]) | - | ○ | - | - | ||
 |
後側方車両検知警報システム(レーンチェンジアシスト機能付)[BSW/LCA]★ | 車線変更時、隣車線に車両がいる場合に警報します。(後側方車両検知警報システム(レーンチェンジアシスト機能付)[BSW/LCA]★/後側方衝突防止支援システム[ABSA]★) | 警報 | ○ | - | - | - | |
 |
車線逸脱警報システム[LDW] | 運転者が意図せず走行車線から逸脱しそうなとき、警報します。(車線逸脱警報システム[LDW]/車線逸脱防止支援機能[LDP]) | - | ○ | - | - | ||
 |
ふらつき警報[DAA] | ハンドル操作から運転者の注意力が低下していると判断したとき、警報音と表示により運転者に休憩を促します。(ふらつき警報[DAA]) | - | - | - | - | ||
| 後方 |  |
後退時交差車両検知警報システム[RCTA]★ | 後退時、後方を横切ろうとする車両があるとき、警報します。(後退時交差車両検知警報システム[RCTA]★) | 警報 | ○ | - | - | - |
- レーダーセンサー/カメラ類の取り扱い注意に従って、お手入れをお願いします。適切なお手入れを行わないと、システムが正常に作動しないおそれがあります。(レーダーセンサーの取り扱い)、(フロントカメラの取り扱い)、(センサーの取り扱い)、(フロントビューカメラ★/サイドビューカメラ★の取り扱い)、(リヤビューカメラ★の取り扱い)
- 後方への支援には使用されません。
- 後方への支援時にリヤビューカメラ★が使用されます。
走行支援機能
- 走行支援機能は、自動で運転する装置ではありません。運転者は交通法規を遵守し、常に周囲に注意し、道路・交通・自車の状況に応じハンドル、ブレーキペダル、アクセルペダルを確実に操作し、安全な運転を行う責任があります。性能には限界があるため、システムだけに頼った運転はせず、常に安全運転を心がけてください。
- レーダー、カメラ、センサーの性能には限界があります。詳細については、各検知条件と制限をお読みください。
レーダーセンサーの検知条件と制限
フロントカメラの検知条件と制限
センサーの検知条件と制限
フロントガラスに装備されたフロントカメラ、フロントグリルおよびリヤバンパーに装備されたレーダーセンサー、フロントバンパーおよびリヤバンパーに装備されたセンサーで構成された、走行を支援するシステムです。
作動させるためにマイパイロットスイッチ操作が不要な機能(メーターでのON・OFF設定が可能)
- 衝突被害軽減ブレーキシステム[FCM]
- 踏み間違い衝突防止アシスト[EAPM]
- 前方衝突予測警報[PFCW]
- 後側方車両検知警報システム(レーンチェンジアシスト機能付)[BSW/LCA]★
- 後側方衝突防止支援システム[ABSA]★
- 車線逸脱防止支援機能[LDP]
- 車線逸脱警報システム[LDW]
- 後退時交差車両検知警報システム[RCTA]★
- ふらつき警報[DAA]
- 標識認識機能[TSR]
- 先行車発進通知[LCDN]
作動させるためにマイパイロットスイッチ操作が必要な機能
- マイパイロット★
走行支援機能の設定
- マルチインフォメーションディスプレイで[設定]⇒[運転支援]⇒必要な機能を選択すると、設定を切り替えることができます。
| 機能名 | 設定できる機能 |
|---|---|
| 車線維持支援 | 車線維持支援機能[LKA] |
| 側方支援 | 車線逸脱警報システム[LDW]、車線逸脱防止支援機能[LDP] |
| 後側方支援★ | 後側方車両検知警報システム(レーンチェンジアシスト機能付)[BSW/LCA]、後側方衝突防止支援システム[ABSA] |
| 緊急支援 | 衝突被害軽減ブレーキシステム[FCM]、前方衝突予測警報[PFCW]、踏み間違い衝突防止アシスト[EAPM] |
| 先行車発進通知 | 先行車発進通知[LCDN] |
| 制限速度標識/速度標識表示 | 最高速度標識認識 |
| 道路標識/標識認識支援 | 進入禁止標識認識/一時停止標識認識支援 |
| 駐車支援 | 移動物検知機能、パーキングセンサー(フロント/リヤ)など |
| 後退時車両検知警報★ | 後退時交差車両検知警報システム[RCTA] |
| ふらつき警報 | ふらつき警報[DAA] |
レーダーセンサーの検知条件と制限
- レーダーセンサーは次のような物体は検知できないことがあります。
- 歩行者、自転車、動物など
- 対向車
- 前方の車両がオートバイのような幅の狭い車両
- 後退時交差車両検知警報システム[RCTA]のレーダーセンサーは、次のような物体は検知できないことがあります。
- 約30km/h以上の速度で通過する車両
- 約8km/h以下の速度で通過する車両
- 次のような場合は、前方の車両を検知できないことがあります。
- 悪天候(雨、雪、霧など)で視界が悪いとき
- 前方の車両や対向車などにより水、雪、砂などの巻き上げが発生しているとき
- 雪や氷、泥などがレーダーセンサー周辺に付着しているとき
- 放送局・レーダー搭載車両など周辺の電波源により影響を受けているとき
- トンネル内を走行しているとき
- 前方の車両がけん引を行っているとき
- 前方の車両との距離が極端に近いとき
- 急なカーブや、勾配の変化があるところを走行しているとき
- 次のような状況では、レーダーセンサーが接近する車両を検知できず、後退時交差車両検知警報システム[RCTA]が警報を出さない場合があります。
- 隣に駐車している車両などが、レーダーセンサーの検出エリアを妨げているとき
- 駐車枠線が斜めに引かれた駐車場に駐車しているとき
- 回り込むようにして自車両後方へ車両が接近してきたとき
- 接近してきた車両の向きが、自車両の向きと同じまたはそれに近いとき
- 次のような状況では、隣の車線の車両を検知できないことがあります。
- 車線の幅が極端に広い道路を運転しているとき
- 悪天候(雨、雪、霧など)で視界が悪いとき
- 水、雪、砂などの巻き上げが発生しているとき
- 雪や氷、泥などがレーダーセンサー周辺に付着しているとき
- 放送局・レーダー搭載車両など周辺の電波源により影響を受けているとき
- 次のような車両は、正確に検知できない場合があります。
- 背の低い車両や、オートバイなどの幅の狭い車両
- 停車状態から検知範囲に居続ける車両
- 後方から速い速度で接近してくる車両
- 自車両が速い速度で追い越した車両
- 合流や車線変更で自車両の横にほぼ同じ速度で移動してきた車両
フロントカメラの検知条件と制限
- フロントカメラは次のような障害物を検知できないことがあります。
- 子供などの背の低い人、動物、自転車
- 対向車両
- 道路構造物(ガードレール、ポールなど車両と歩行者以外の障害物)
- フロントカメラは車両の後端を認識するため、次のような車両を検知しないもしくは検知できない場合があります。
- バンパー形状などにより、タイヤが見えにくい車両
- 幌がはみ出し、後端形状がはっきりしない車両
- 前方を横切って通過する車両
- 斜めもしくは前向きに止まっている車両
- フロントカメラは次のような場合、前方の車両、歩行者を検知できないことがあります。
- 悪天候(雨、雪、霧、風塵、砂塵、吹雪など)で視界が悪いとき
- 前方の車両や対向車などにより水、雪、砂などの巻き上げが発生しているとき
- カメラ前方のフロントガラスのくもりや、汚れ、油膜、虫汚れ、水滴、氷、雪、泥などが付着しているとき
- 前方から強い光(太陽光や対向車両のハイビームなど)を受けているとき
- 前方の強い光により前方車両のタイヤの部分が影になり見えにくいとき
- 夜間やトンネル内などでヘッドライトを点灯していない、あるいはヘッドライトのレンズが極端に汚れている、または光軸調整が適切に行われていないとき
- 夜間やトンネル内などで前方の車両のテールランプが点灯していないとき
- トンネルの出入り口や日陰など、急に明るさの変化が起こったとき
- カーブを走行しているとき
- 勾配の変化があるところを走行しているとき
- 未舗装路など凹凸のある路面を走行しているとき
- 歩行者が大きな荷物を持っている、背景と同じ色の服を着ているなど人特有の輪郭が認識できないとき
- 前方車両からの太陽光などを強く反射されたとき
- 対象物の位置や動きが大きく変化した場合(自車の車線変更・右左折、前方車両の右左折・急ハンドル・急加速・急減速など)
- 始動してから約15秒間
- カメラの向きがずれているとき
- フロントカメラは次の例のような周辺状況では対象物の形状を正しく検出できずシステムが作動しない場合があります。
- 対象物が背景と似た色合いで区別ができない場合
- 対象物が道路標示(道路上の横断歩道、制限速度などの標示)の近くにある場合
- 対象物が路面の水たまりの付近にある場合(周りの風景が水たまりに映りこむなど)
- 対象物が建物や街路樹などの影と重なっているとき
- 対象物と自車の間に水蒸気や煙などがあるとき
- 夜間やトンネル内など暗い場所にいる歩行者
- 車高の低い車両または最低地上高(地面から車体までの高さ)が極端に低いもしくは極端に高い車両
- 特殊な形状の車両(タンクローリー、サイドカーなど)
- 前方の至近距離に割り込んだ車両
- 前方の至近距離に飛び出してきた歩行者
- 自車の正面から横にずれた位置に存在する車両や歩行者、人が乗車している自転車
- 後端面積が小さい車両(空荷のトラックなど)
- リヤタイヤから車両後端までが長い車両
- 四輪車以外の車両(二輪車など)
- 荷台から荷物や幌がはみ出している車両
- フロントカメラは次の例のような場合、衝突するおそれがある対象を正しく検出できない場合があります。
- 複数の対象物同士が近接している場合
- 衝突するおそれのある対象の二輪車または車高の低い車両の前方近くに車両がいる場合
- 自車の正面から横にずれた位置に存在する車両や歩行者
センサーの検知条件と制限
- 次のような場合、センサーは正しく検出できないことがあります。
- 人、動物などの動いているもの、特に人は衣服の種類によっても検出できない場合があります。
- 背の低い障害物
- 溝や穴など地面より低い場所
- ポールなどの幅の狭い障害物
- 針金、ロープ、チェーンなどの細い障害物
- 金網、フェンス、ショッピングカートなどのすき間が多い障害物
- 鋭角的な形の障害物
- 壁などに配置されている配管などの障害物
- 地面から高い位置に存在する障害物
- 柱などで構成されている平面ではない障害物
- スポンジ状のものや雪などの表面が柔らかく音波を吸収しやすい障害物
- バンパーに非常に近い障害物
- 急に進行方向に現れた障害物
- 急にセンサーの検出範囲に飛び込んできた障害物
- 急に近づいてきた障害物
- 車両側方にある障害物
- 障害物の面が車両の前面、または後面に対して斜めのとき
- センサー部や周辺が凍結したり、雨、雪、氷、汚れなどがセンサーに付着したりしているとき
- 車両姿勢が大きく傾いているとき
- 炎天下や寒冷時でセンサー周辺が著しく高温または低温のとき
- 凸凹道、坂道、砂利道、草むらを走行しているとき
- 他車のホーン、オートバイの排気音や工事など、付近で大きな音がしたとき
- 車両感応センサーや他車のセンサーなど、超音波を発するものが付近にあるとき
- 次のような場合、センサーは検知することがあります。
- 周囲に草が生い茂っているとき
- 車両側面の近くに壁があるとき
- 高さのあるゲート、狭いトンネル、料金所のバーなど
- マンホールやスピードバンプなど路面上に段差や突起物があるとき
- 垂れ下がった旗、ビニールカーテンなどをくぐって走行するとき
- 車両周辺に雪のかたまりがあるとき
- 勾配路
- 車両感応センサーや他車のセンサーなど、超音波を発するものが付近にあるとき
- 他車のホーン、オートバイの排気音や工事など、付近で大きな音がしたとき
- 背が高く上部が張り出しているものがあるとき
- 雨、雪、氷、汚れなどがセンサーに付着しているとき
- 凸形状または凹形状の構造物の近くを通過しているとき
- 車両側方の近くに構造物(壁、料金所設備、駐車場のゲート設備など)があるとき