マイパイロットパーキング★
マイパイロットパーキングは、車庫入れ、縦列駐車、前向き駐車を支援する機能です。
マイパイロットパーキングについて
- スマートフォン連携ナビゲーションの画面に表示されます。
- カメラとセンサーにより駐車位置を検出し、アクセル、ブレーキ、ステアリング、シフトポジション操作を制御することにより駐車操作を支援します。
- マイパイロットパーキングの性能には限界があります。
安全運転を行う責任は運転者にありますので、通常の運転操作と同様に、周りの状況をミラーや目視で直接確認し、周囲の車両や障害物、人などに接触しそうな場合はブレーキペダルを踏んで車両を停止してください。 - ステアリング制御中に、ハンドルのスポーク部に触れない。
手や指がスポーク部に巻き込まれ、ケガをするおそれがあります。また、ネクタイ、スカーフなども巻き込まれないように十分注意してください。思わぬ事故につながるおそれがあります。
マイパイロットパーキングスイッチ
- スイッチを押すとマイパイロットパーキングが起動します。
- 駐車制御を開始したあと、スイッチを押している間車両が移動します。スイッチから手を離すと車両が停止します。
マイパイロットパーキング画面
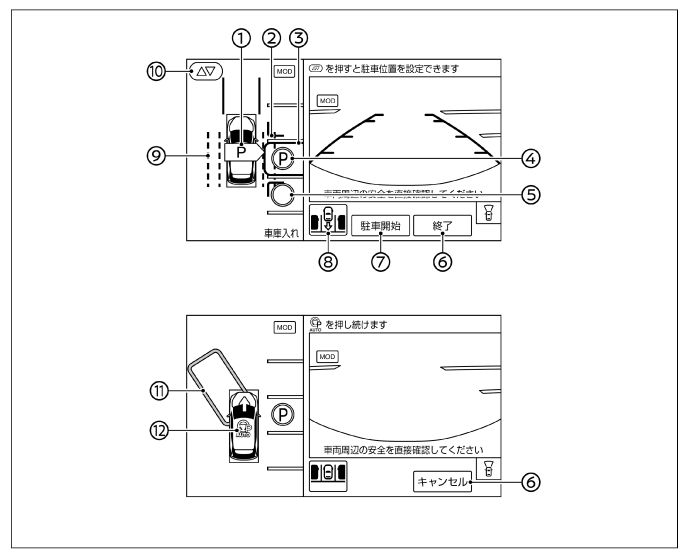
| 番号 | 説明 |
|---|---|
 |
駐車位置検出アイコン |
 |
障害物目安線(赤色) |
 |
駐車目安枠(青色) |
 |
|
 |
|
 |
[終了]/[キャンセル] |
 |
[駐車開始] |
 |
駐車方法切り替えアイコン |
 |
駐車位置検出目安線(緑色) |
 |
駐車目安枠調整アイコン |
 |
切り返し目安枠(緑色) |
 |
マイパイロットパーキング制御アイコン( |
 :左側の駐車位置が検出されているとき
:左側の駐車位置が検出されているとき
- ワイパー作動中やカメラレンズに付着した水滴などを検出すると
 が表示されます。表示中は、検出できる駐車位置が制限されます。
が表示されます。表示中は、検出できる駐車位置が制限されます。
車速が約10km/h以上になった場合
駐車位置検出中に車速が約10km/h以上になると、上の画面へ切り替わります。
車速が約10km/h以下になると、通常のマイパイロットパーキング画面に戻ります。

マイパイロットパーキングを使って駐車する
操作例:車庫入れ(右側)
-
駐車したい場所の手前で停車します。
-
<マイパイロットパーキングスイッチ>を押すと、マイパイロットパーキングが起動します。
- 以下の場合には、マイパイロットパーキングを起動できません。
- 車速が約20㎞/h以上のとき
- ドアミラーが閉じているとき
- 運転席、助手席、後席、またはテールゲートのいずれかのドアを開いているとき
- 駆動用バッテリー残量が少なくなっているとき
- システムが故障しているとき
- スマートフォン連携ナビゲーションが起動中のとき
- スマートフォン連携ナビゲーションの<カメラ>を押し、マルチアラウンドモニター画面上の[
 ]をタッチしても、マイパイロットパーキングを起動できます。マルチアラウンドモニターの機能については(マルチアラウンドモニター(移動物検知機能付)★)をお読みください。
]をタッチしても、マイパイロットパーキングを起動できます。マルチアラウンドモニターの機能については(マルチアラウンドモニター(移動物検知機能付)★)をお読みください。 - マイパイロットパーキング作動中はオーディオなどの音量が小さくなります。
- 以下の場合には、マイパイロットパーキングを起動できません。
-
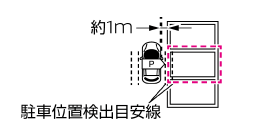
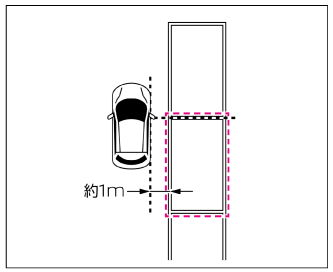
ゆっくりと前進し、駐車したい場所の真横(約1m)でブレーキペダルを踏んで停車します。
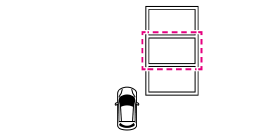
駐車位置検出アイコン( )が駐車したい場所の中央付近を示すように車両を停止します。
)が駐車したい場所の中央付近を示すように車両を停止します。
2本の駐車位置検出目安線(緑色)の範囲内に駐車区画線が入るように車を移動すると、駐車位置が検出されやすくなります。
-
停車している状態で、駐車したい場所に
 が表示されていることを確認してください。が表示されている駐車場所内や周辺に近接した障害物がないこと、車両が駐車できる十分な広さがあり、駐車可能な場所であることを確認してください。
が表示されていることを確認してください。が表示されている駐車場所内や周辺に近接した障害物がないこと、車両が駐車できる十分な広さがあり、駐車可能な場所であることを確認してください。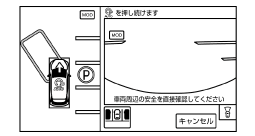
- 周りの状況をミラーや目視で直接確認し、周囲の車両や障害物、人に接触しそうな場合は、ブレーキペダルを踏み車両を停止してください。状況が改善しないときは、マイパイロットパーキングの使用を中断してください。画面上の[キャンセル]をタッチすると駐車制御を終了することができます。
- 障害物目安線は駐車位置に移動する際に車両の一部がはみ出す可能性がある範囲の目安を示します。車両やポールなどの障害物が障害物目安線より外側にあるときに円滑な駐車を行うことができます。
- 駐車目安枠が実際の駐車可能な位置に表示されない場合(障害物や側溝にかかるなど)、適切な駐車位置に手動で設定してください。
駐車目安枠の調整 - 車両を停止させた状態で[駐車開始]をタッチせずに<マイパイロットパーキングスイッチ>を押し続けると、自動的にブレーキがかかり停車状態を保持します。
車両を移動する場合はセレクターレバーを操作し、アクセルペダルをゆっくりと踏み込み移動します。 - 駐車方法切り替えアイコンをタッチすると、駐車方法を変更することができます。
駐車方法を変更する - 駐車位置(◎)をタッチすると駐車位置を選択することができます。
- 方向指示器を作動させると、作動方向の駐車枠を検出します。
-
ブレーキペダルを踏んだまま画面上の[駐車開始]をタッチします。
駐車制御を開始します。
制御を開始するとマイパイロットパーキング制御アイコン()が表示され、自動でブレーキをかけて停車状態を保持します。
センサー、カメラで検出した障害物により駐車位置まで移動できないと判断した場合は、駐車制御が開始されません。その場合は通常走行で駐車を行ってください。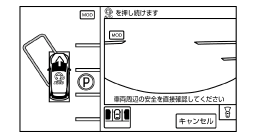
- [キャンセル]をタッチすると車両が停止し、電動パーキングブレーキが作動してマイパイロットパーキングが終了します。駐車制御開始前にタッチすると、前の画面に戻り駐車位置の検出を再開します。
- アクセルペダルを操作するとブレーキが解除されます。
- 駐車制御を開始するとパーキングセンサーが自動でONになります。マイパイロットパーキングが終了すると、マルチインフォメーションディスプレイで設定されたセンサーの設定状態に戻ります。
- 駐車制御中は<現在地>、<メニュー>を押しても画面は切り替わりません。<カメラ>を押すと、マイパイロットパーキングは終了します。
マイパイロットパーキングの終了のしかた
-
<マイパイロットパーキングスイッチ>を押したままでブレーキペダルを徐々にゆるめて車両をゆっくりと前進させます。
切り返し目安枠の方向(矢印の向き)に車両が移動します。
周辺状況に応じてブレーキペダルを踏んで車速を調整してください。
<マイパイロットパーキングスイッチ>から手を離すと車両が停止します。
再度押し続けると駐車制御が再開されます。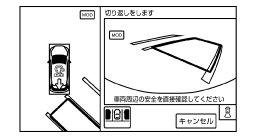
- 設定した駐車位置やセンサー、カメラで検出した障害物の位置により、駐車位置までの経路と切り返し回数が変わります。
- 以下の場合には駐車制御を開始できません。状況が改善してから、<マイパイロットパーキングスイッチ>を押し続けると駐車制御を開始できます。
- 運転席のシートベルトを締めていないとき
- シフトポジションが
 のとき
のとき - 電動パーキングブレーキが作動しているとき
- アクティブスタビリティコントロール[ASC]がOFFのとき
- 急な勾配のある場所では駐車支援を開始できません。通常走行で駐車を行ってください。
-
切り返し目安枠(緑色)に到達するとシフトポジションが自動で切り替わり、車両が後退します。
障害物などがあり切り返し目安枠に到達できない場合は、ブレーキペダルを踏んで障害物の手前で車両を停止させ、セレクターレバーで進行方向を切り替えてください。
駐車制御の進行方向を切り替える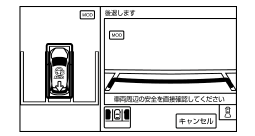
- センサー、カメラで検出した障害物により駐車位置まで移動ができないと判断した場合、自動的に駐車制御を終了することがあります。適切な位置に車両を移動させてください。
-
駐車目安枠(赤色)に到達すると車両が停止し、駐車制御が終了します。
駐車制御が終了すると、音と表示でお知らせします。
そのとき、シフトポジションがに切り替わり、電動パーキングブレーキが作動します。
駐車目安枠(水色)に到達する前に駐車制御が自動で終了することがあります。
駐車制御中(車両移動時)の自動終了について
障害物などがあり駐車目安枠に到達できない場合は、ブレーキペダルを踏んで車両を停止させ、画面上の[キャンセル]をタッチしてマイパイロットパーキングを終了させてください。- 駐車車両などの障害物が障害物目安線にかかっている場合、センサーが障害物を検知して車両が停止し、駐車を完了できないことがあります。
マイパイロットパーキングの一時停止について
駐車制御中に<マイパイロットパーキングスイッチ>から手を離すと、自動的にブレーキがかかり車両が停止し、シフトポジションが に切り替わります。
に切り替わります。
再度<マイパイロットパーキングスイッチ>を押すと駐車制御を再開できます。
駐車制御の自動停止
以下の場合は自動的にブレーキがかかり車両が停止します。
- 進行方向に障害物を検出したとき
- 運転席のシートベルトを外したとき
<マイパイロットパーキングスイッチ>から一度手を離し、状況が改善されたことを確認してから再度押し続けることで駐車制御を再開できます。
- 駐車制御を再開すると、自動でシフトポジションが
 または
または に切り替わります。
に切り替わります。 - 障害物を検出して停止した場合、駐車制御を再開すると進行方向を変えて、切り返しにより駐車制御を継続します。
- センサー、カメラで検出した障害物により駐車位置まで移動ができないと判断した場合、駐車制御を再開できません。
- シートベルトを着用しないと駐車制御を再開できません。
マイパイロットパーキングの終了のしかた
画面上の[終了]または[キャンセル]をタッチすると、マイパイロットパーキングが終了します。
駐車制御中にマイパイロットパーキングを終了すると、自動的にブレーキがかかり車両が停止し、電動パーキングブレーキが作動します。このとき、シフトポジションはに切り替わります。
駐車位置検出中の自動終了について
以下の場合は、マイパイロットパーキングが自動的に終了します。
- 運転席、助手席、後席、またはテールゲートのいずれかのドアを開けたとき
- マイパイロットパーキング起動後約3分以上経過したとき
- マイパイロットパーキング起動後約500m以上走行したとき
- 車速が約20km/hを超えたとき
- ドアミラーを閉じたとき
- <現在地>や<カメラ>などで画面を切り替えたとき
- システムに異常が検出されたとき
- 駐車位置検出中の自動終了時はブレーキペダルを踏む
自動でブレーキがかからないため、思わぬ事故につながるおそれがあります。
駐車制御中(車両移動時)の自動終了について
以下の場合は、マイパイロットパーキングが自動的に終了します。
駐車制御中に自動終了すると、自動的にブレーキがかかり車両が停止し、電動パーキングブレーキが作動します。このとき、シフトポジションはまたはに切り替わります。
- ハンドルを操作したとき
- アクセルペダルを操作したとき
- 運転席、助手席、後席、またはテールゲートのいずれかのドアを開けたとき
- 電動パーキングブレーキを作動させたとき
- シフトポジションをまたはに切り替えたとき
- シフトポジションをまたはに切り替えたとき
- <カメラ>を押したとき
- ドアミラーを閉じたとき
- 障害物などにより駐車位置まで移動ができないと判断したとき
- 駐車制御による駐車位置が大きくずれたと判断したとき
- アクティブスタビリティコントロール[ASC]をOFFにしたとき
- ASC/TCS/ABSが作動したとき
- 車速が約8km/hを超えたとき
- システムに異常が検出されたとき
- 駐車位置に近い場所で以下の状況になったとき
- <マイパイロットパーキングスイッチ>から手を離したとき
- 駐車経路上に障害物を検出したとき
- 運転席のシートベルトを外したとき
駐車制御中(一時停止時)の自動終了について
以下の場合は音と表示でお知らせし、マイパイロットパーキングが自動的に終了します。
このとき、電動パーキングブレーキが作動しますが、シフトポジションは切り替わりません。
- 運転席、助手席、後席、またはテールゲートのいずれかのドアを開けたとき
- 電動パーキングブレーキを作動させたとき
- シフトポジションをまたはに切り替えたとき
- <マイパイロットパーキングスイッチ>から手を離して約1分以上経過したとき
- <カメラ>を押したとき
- ドアミラーを閉じたとき
- ASCをOFFにしたとき
- ASC/TCS/ABSが作動したとき
- システムに異常が検出されたとき
駐車制御一時停止中のアクセルペダル操作について
駐車制御一時停止中にアクセルペダルを操作したときは、音と表示でお知らせし、マイパイロットパーキングが自動的に終了します。
シフトポジションがの時、電動パーキングブレーキが作動します。
シフトポジションがまたはの時、運転者のアクセルペダル操作に従って走行を開始します。
駐車方法を変更する
[駐車開始]をタッチする前に、駐車方法切り替えアイコンで駐車方法を変更できます。
アイコンをタッチするごとに駐車方法が切り替わります。
<駐車方法>
車庫入れ( ) ) |
並列駐車場所に後退して駐車する駐車操作を支援します。 |
縦列駐車( ) ) |
縦列駐車場所に後退して駐車する駐車操作を支援します。 |
前向き駐車( ) ) |
並列駐車場所に前進して駐車する駐車操作を支援します。 |
- 選択できる駐車方法について設定することができます。
マイパイロットパーキングの駐車方法について
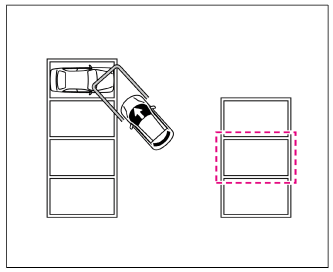
車庫入れ
駐車したい場所の横、約1mの間隔で駐車位置に近づいてください。
駐車位置との間隔が広すぎると、障害物が検出できない場合や、区画線を検出できない場合があります。
駐車位置検出機能について
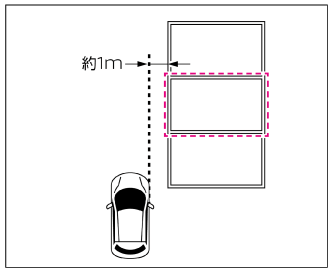
ゆっくりと前進し、駐車位置に垂直になるようにブレーキペダルを踏んで車両を停止させてください。
自車の運転席ドア付近が駐車したい場所の中央付近になるように車両を停止させてください。
図のような経路で駐車制御を行います。
駐車経路、切り返し回数は駐車位置、周辺の障害物の位置により異なります。
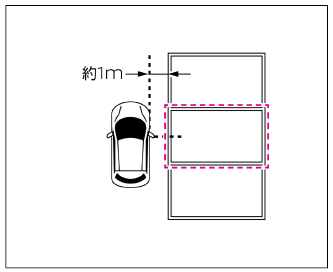
縦列駐車
駐車したい場所の横、約1mの間隔で駐車位置に近づいてください。
駐車位置との間隔が広すぎると、障害物が検出できない場合や、区画線を検出できない場合があります。
駐車位置検出機能について
ゆっくりと前進し、駐車位置に平行になるようにブレーキペダルを踏んで車両を停止させてください。
自車の運転席ドア付近が駐車したい場所の先端になるように車両を停止させてください。
図のような経路で駐車制御を行います。
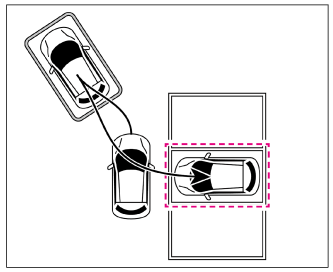
障害物や駐車位置によっては後退から開始する場合があります。
駐車経路、切り返し回数は駐車位置、周辺の障害物の位置により異なります。
(例)前進から開始する場合の経路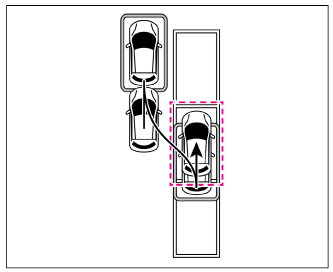
(例)後退から開始する場合の経路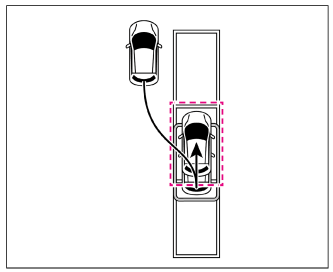
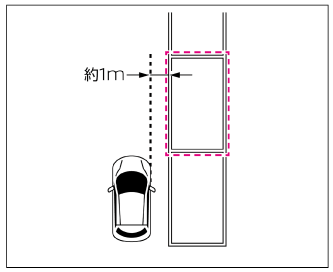
前向き駐車
駐車したい場所の横、約1mの間隔で駐車位置に近づいてください。
駐車位置との間隔が広すぎると、障害物が検出できない場合や、区画線を検出できない場合があります。
駐車位置検出機能について
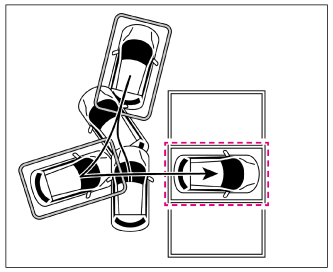
ゆっくりと前進し、駐車位置に垂直になるようにブレーキペダルを踏んで車両を停止させてください。
自車の運転席ドア付近が駐車したい場所の中央付近になるように車両を停止させてください。
図のような経路で駐車制御を行います。
駐車経路、切り返し回数は駐車位置、周辺の障害物の位置により異なります。
駐車目安枠の調整
駐車目安枠を手動で調整することができます。
-
ブレーキを踏んで車両を停止し、画面上の駐車目安枠調整アイコン(
 )をタッチします。が表示されているときは、のあった位置に駐車目安枠が表示されます。
)をタッチします。が表示されているときは、のあった位置に駐車目安枠が表示されます。
駐車位置が検出されていないときは、デフォルトの位置に駐車目安枠が表示されます。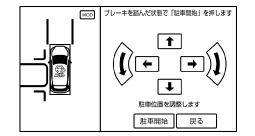
- 矢印をタッチして微調整します。
- 表示される障害物目安線は駐車位置に移動する際に車両の一部がはみ出す可能性がある範囲の目安を示します。車両やポールなどの障害物が障害物目安線より外側にあるときに円滑な駐車を行うことができます。
- 左側画面を直接タッチすることで、駐車目安枠を移動することができます。
- 方向指示器を使って駐車目安枠の方向を切り替えることができます。
駐車制御の進行方向を切り替える
車両の進行方向に障害物(ポールなど)がある、または溝や崖など地面より低い場所があるときには、ブレーキペダルを踏んで車両を停止させ、<マイパイロットパーキングスイッチ>から手を離してください。
マイパイロットパーキングの注意事項
その後、セレクターレバーで進行方向を切り替え、<マイパイロットパーキングスイッチ>を再度押すと駐車制御を再開します。
(例)駐車車両がある場合
-
ブレーキペダルを踏んで車両を停止させ、<マイパイロットパーキングスイッチ>から手を離します。
-
セレクターレバーで進行方向を切り替えます。
<マイパイロットパーキングスイッチ>を再度押すと駐車制御を再開します。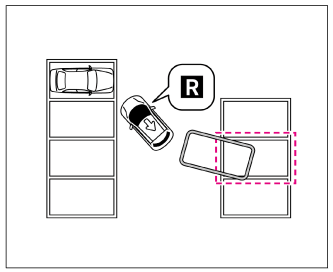
- センサー、カメラで検出した障害物により駐車位置まで移動ができないと判断した場合、駐車制御を再開できません。
駐車位置検出機能について
カメラとセンサーを使って駐車位置を検出します。複数の駐車位置を検出できます。カメラを使い、駐車区画線を認識して駐車位置を表示します。
センサーにより、検出した駐車区画内に障害物を検知した場合は駐車位置を表示しません。
- フロントビュー、サイドビュー、リヤビューカメラのいずれかのカメラのレンズに汚れ、水滴などが付着しているときは検出できる駐車位置に制限がかかる場合があります。
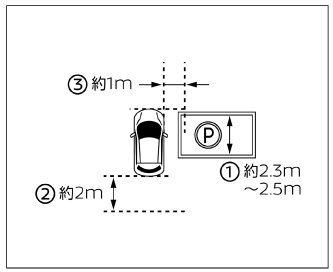
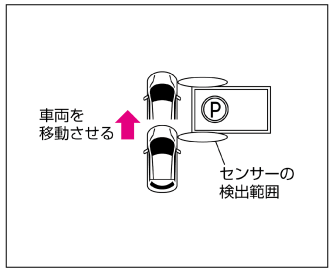
車庫入れ、前向き駐車が選択されている場合
以下の条件で駐車位置を検出します。
- 幅約2.3m~2.5mの駐車区画を基本として認識します。
- 単線またはU字の区画線を基本として認識します。
- 区画線の太さは約15㎝を基本として認識します。
- 自車の前端から自車の後端約2m以内に区画線があるときに認識します。
- 駐車区画が自車から約1mにあるときに認識します。
- [左右の自動選択]がONの場合は車両の両側の駐車位置が検出されます。
マイパイロットパーキングの設定
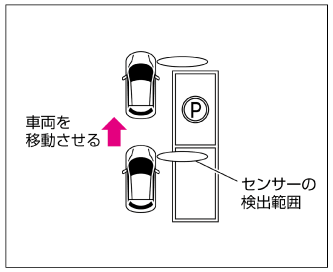
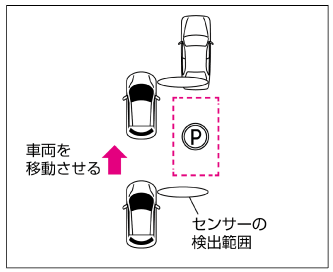
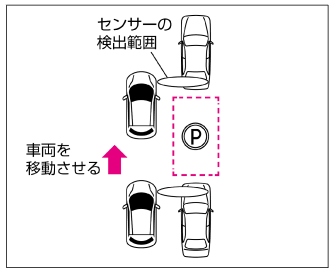
フロントのセンサーの検出範囲がカメラにより検出された駐車区画上を通過し、障害物を検知した場合は駐車位置を表示しません。
センサーの検出範囲より遠くにある駐車区画内の障害物は検出できません。
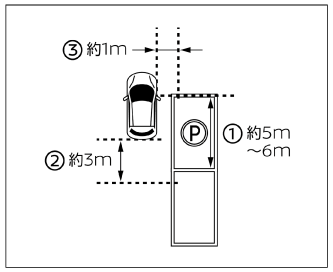
縦列駐車が選択されている場合
以下の条件で駐車位置を検出します。
- 長さ約5m~6mの駐車区画を基本として認識します。
- 区画線は単線を基本として認識します。
- 区画線の太さは約15㎝を基本として認識します。
- 自車の運転席ドア付近から自車の後端約3m以内に区画線があるときに認識します。
- 駐車区画が自車から約1m③にあるときに認識します。
- [左右の自動選択]がONの場合は車両の両側の駐車区画が検出されます。
マイパイロットパーキングの設定
フロントのセンサーの検出範囲がカメラにより検出された駐車区画上を通過し、障害物を検知した場合は駐車位置を表示しません。
センサーの検出範囲より遠くにある駐車区画内の障害物は検出できません。
駐車区画線が認識されない場合は、センサーを使って周囲の障害物から駐車場所を検出します。
周囲の障害物の位置や角度によっては駐車目安枠は大きくずれる場合があります。
マイパイロットパーキングに使用するカメラ、センサーについて
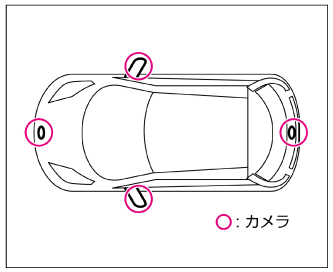
カメラ
マルチアラウンドモニターのカメラを使用しています。
取り扱いについては、フロントビュー★/サイドビューカメラ★の取り扱い(フロントビュー★/サイドビューカメラ★の取り扱い)、リヤビューカメラの取り扱い(リヤビューカメラの取り扱い)をお読みください。
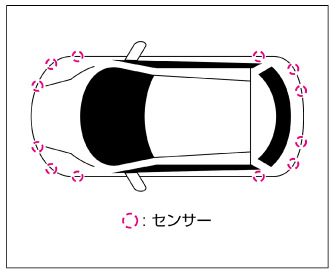
センサー
前後左右の12個のセンサーを使用しています。
取り扱いについては、センサーの取り扱い(センサーの取り扱い)をお読みください。
マイパイロットパーキングの注意事項
- 画面だけを見ながら走行することは絶対にしないでください。
障害物に接触したり、思わぬ事故につながったりするおそれがあります。 - 周囲の車両や人の動きに十分注意してください。
検出された通路幅を有効に使って駐車支援を行っています。対向車や後続車、歩行者の動きに十分注意して駐車制御の操作を行ってください。 - マイパイロットパーキングによる駐車支援が必要なくなったときは、マイパイロットパーキングを終了してください。
マイパイロットパーキングが作動状態のままだと思わぬ事故につながるおそれがあります。 - 車を降りる前に、電動パーキングブレーキが作動していること、およびシフトポジションがであることを確認してください。
- マイパイロットパーキングを使用する前に、車両周辺に切り返しなどの駐車操作ができるスペースが十分あることを直接確認してください。
- 状況によっては車両内外の騒音などにより、警報音が聞こえない場合があります。
- 駐車制御中は周囲へ車両の進む方向を知らせるために方向指示器を作動させてください。
- 次のような状況ではマイパイロットパーキングを使用しないでください。
- 人や車両などの通行量が多い場所
- 停車および駐車が禁止されている場所
- 車両が入らないほど狭い場所
- 穴や溝などがあるような駐車できない場所
- 通路幅が狭い場所
- 急な勾配のある場所
- 砂地や砂利地などの整備されていない路面
- 雪や凍結などでスリップしやすい路面
- 傾斜地や段差、縁石、わだちなどのある平坦ではない路面
- 道幅と駐車位置に十分なスペースがないとき
- 真夏の炎天下でアスファルトが溶けているような路面
- 駐車場にロードヒーター(路面凍結防止用のヒーター)が設置されている場所
- 機械式駐車場や自動ロック装置のある駐車場、駐車場所に障害物などがある場所
- 過積載のとき
- 摩耗しているタイヤ、スペアタイヤのような非常用タイヤ、タイヤチェーンを装着しているとき
- タイヤの空気圧が適正ではないとき
- けん引フックなどを取り付けているとき
- カメラの視界を妨げるようなものを取り付けたとき
- カメラが汚れや西日、影などで見にくいとき
- ドアミラーが開き切っていないとき
- カメラが正常に取り付けられていないとき
- バンパーにセンサーの性能を妨げるようなものを取り付けたとき
- バンパーにへこみなどがあるとき
- センサー周辺に雨や雪、泥などが付着しているとき
- 極端に重い荷物を積んだり、車両の片側にだけ荷物などを積んでいたりして車両が傾いているとき
-
縁石や車止めは検出できません。
縁石にホイールが接触しそうな場合や車両が車止めを越えそうな場合にはブレーキペダルを踏み車両を停止させてください。車両が損傷することがあります。
- 以下のような状況ではセンサーやカメラが障害物を検出できず、駐車位置や切り返し位置が適切に調整されないことがあります。障害物がある場合はブレーキペダルを踏んで車両を停止させるなど、適切な運転操作をしてください。
- 人、動物などの動いているもの特に人は衣服の種類によっても検出できない場合があります。
- 背の低い障害物
- 溝や穴など地面より低い場所
- ポールなどの幅の狭い障害物
- 針金、ロープ、チェーンなどの細い障害物
- 金網、フェンス、ショッピングカートなどのすき間が多い障害物
- 鋭角的な形の障害物
- 壁などに配置されている配管などの障害物
- 地面から高い位置に存在する障害物
- 柱などで構成されている平面ではない障害物
- スポンジ状のものや雪などの表面が柔らかく音波を吸収しやすい障害物
- バンパーに非常に近い障害物
- 旋回時などでセンサーの検出範囲に急に飛び込んできた障害物
- 急に近づいてきた障害物
- 車両側方にある障害物
- 障害物の面が車両の前面、または後面に対して斜めのとき
- センサー部が凍結したり、雨、雪、氷、汚れなどがセンサーに付着しているとき
- 車両姿勢が大きく傾いているとき
- 炎天下や寒冷時
- 凸凹道、坂道、砂利道、草むらを走行しているとき
- 周囲で大きな音が鳴っているとき
- 周囲に超音波(センサーを搭載した車両を含む)を発するものがあるとき
- 雨や水しぶきがかかったとき
- 夜間、地下、立体駐車場など周囲が暗いとき
- 悪天候(雨、雪、霧、粉じん、砂塵、吹雪など)などで区画線がはっきりと映っていないとき
- カメラにお湯や水をかけたときなど、レンズがくもっているとき
- 太陽や電灯の光が路面に映っているとき
- 太陽や電灯の強い光が路面にあたっているとき
- 降雨時や雨上がりなど、路面が濡れて光っていたり、水たまりがあるとき
- 朝日や夕日など、太陽の光がカメラに入るとき
- カメラのレンズが汚れていたり、水滴が付着しているとき
- カメラの視界を妨げるようなものを取り付けたとき
- 以下のような状況ではブレーキがかかるなど、適切に駐車制御できない場合があります。
- 雨、雪、氷、汚れなどがセンサーに付着しているとき
- 周囲で大きな音が鳴っているとき
- 周囲に超音波(センサーを搭載した車両を含む)を発するものがあるとき
- 周囲に草が生い茂っているとき
- 凸形状または凹形状の構造物の近くを通過しているとき
- 車両側方の近くに構造物(壁、料金所設備、駐車場のゲート設備など)があるとき
- 路面上に段差や突起物、排水溝のふたがあるとき
- 垂れ下がった旗、ビニールカーテンなどをくぐって通過するとき
- 車両周辺に雪のかたまりがあるとき
- 以下のような状況ではシステムが機能を十分に発揮できない場合があります。
- 純正品以外のタイヤを使用しているとき
- 以下のような状況では設定した位置に正しく駐車制御できない場合があります。必要に応じて適切な位置に車両を移動してください。
- 路面が平坦ではないとき
- 極端に重い荷物を積んだり、車両の片側にだけ荷物などを積んで車両が傾いているとき
- 以下のような状況では駐車位置を検出できない、または検出しにくい場合があります。
- 自車が駐車区画に近すぎるとき
- 駐車区画がロープ、ブロックなどで作られている区画線のない駐車場
- 区画線がかすれや汚れによってはっきり見えないとき
- 路面と区画線のコントラストが低いとき
- 路面の区画線が黄色などの白線以外の色のとき
- 駐車区画が極端に狭いもしくは広いとき
- 区画線が極端に短いとき
- 区画線が極端に細いもしくは太いとき
- 駐車エリアが傾斜しているなどカメラ映像上で平行な区画線に見えないとき
- 区画線が斜め線などと接続されているとき
- 区画線に車両の影や木陰などがかかっているとき
- 隣の車両や障害物などが区画線上にあるとき
- 駐車区画内に障害物があるとき
- 夜間、地下、立体駐車場など周囲が暗いとき
- 悪天候(雨、雪、霧、粉じん、砂塵、吹雪など)などで区画線がはっきりと映っていないとき
- カメラにお湯や水をかけたときなど、レンズがくもっているとき
- 太陽や電灯の光が路面に映っているとき
- 太陽や電灯の強い光が路面にあたっているとき
- 降雨時や雨上がりなど、路面が濡れて光っていたり、水たまりがあるとき
- 朝日や夕日など、太陽の光がカメラに入るとき
- カメラのレンズが汚れていたり、水滴が付着しているとき
- カメラの視界を妨げるようなものを取り付けたとき
- 段差、側溝、路面ペイント、引き直し線などがあるとき
- 積雪や融雪剤があるとき
- 石畳や緑化駐車場のとき
- 画面上で駐車区画内にノイズ状の模様があるように表示されているとき
- 駐車区画内に文字などが描かれているとき
- 路面の色や明るさが一様でないとき
- 駐車区画と自車が傾いて止まっているとき
- 通路幅が狭いとき
- 前方に障害物があるとき
- 雨、雪、氷、汚れなどがセンサーに付着しているとき
- 周囲で大きな音が鳴っているとき
- 周囲に超音波(センサーを搭載した車両を含む)を発するものがあるとき
- 周囲に草が生い茂っているとき
- 路面上に段差や突起物、排水溝のふたがあるとき
- 車両周辺に雪のかたまりがあるとき
- 以下のような状況では適切な位置に駐車位置が検出されない場合があります。
- 区画線に見えるような光、建物などの映り込み、段差、側溝、路面ペイント、引き直し線などがあるとき
- 路面補修痕、路面表示などやポールなどの障害物があるとき
- 降雨時や雨上がりなど、路面が濡れて光っていたり、水たまりがあるとき
- 路面の色や明るさが一様でないとき
- 勾配がついている駐車場
- 区画線に駐車車両のサイドステップや、影が差しかかっているとき
- 区画線がかすれや汚れによってはっきり見えないとき
- 自車の影や木陰などの影響を受けてしまったとき
- 純正品以外のタイヤを使用しているときには、設定した位置に正しく駐車制御できない場合があります。冬用タイヤなどへ交換をした際は、三菱自動車販売会社にご相談ください。
マイパイロットパーキングの故障について
システムに異常があると、スマートフォン連携ナビゲーション画面に警告メッセージが表示され、マイパイロットパーキング制御アイコン()の色が橙色に変わり、マイパイロットパーキングが自動的に解除されます。使用中に警告が表示されたときは、安全な場所に停車して<パワースイッチ>をOFFにしてから再度ONにしてください。
上記の操作を行ってもマイパイロットパーキングが起動できないときは、システムの異常が考えられます。通常走行には支障はありませんが、三菱自動車販売会社で点検を受けてください。
マイパイロットパーキングの設定
- スマートフォン連携ナビゲーション画面の[設定]をタッチします。
- [マイパイロットパーキング]をタッチし、設定項目を選びます。
<設定項目>
| [前回駐車方法を選択] | ONにすると前回の駐車方法が選択されます。 OFFにすると車庫入れが選択されます。 |
| [左右の自動選択] | ONにすると車両の両側の駐車位置が検出されます。 OFFにすると前回マイパイロットパーキングを使用した側の駐車位置のみ検出されます。そのとき、方向指示器を作動させると作動方向の駐車位置を検出します。 |
| [駐車方法の設定] | マイパイロットパーキング画面で選択できる駐車方法を設定できます。 ONになっている駐車方法が駐車方法変更アイコンをタッチするごとに選択されます。 OFFになっている駐車方法は駐車方法変更アイコンをタッチしても選択されません。 駐車方法を変更する |